
Guía Completa para Crear tu Propio Sistema de Posicionamiento UWB con ESP32
Descubre cómo ensamblar y configurar un sistema de localización precisa usando tecnología Ultra Wideband y microcontroladores ESP32.
La tecnología Ultra Wideband (UWB) está revolucionando la forma en que interactuamos con el espacio físico, ofreciendo una precisión de localización sin precedentes, típicamente con errores de unos pocos centímetros. Combinada con la versatilidad y conectividad del popular microcontrolador ESP32, abre un mundo de posibilidades para proyectos de posicionamiento en interiores, seguimiento de activos, y mucho más. Esta guía te llevará paso a paso a través del proceso de construcción de tu propio sistema UWB utilizando módulos ESP32.
Puntos Clave para Empezar
- Hardware Necesario: Necesitarás al menos dos módulos ESP32 con capacidad UWB (uno como 'Ancla' fija y otro como 'Etiqueta' móvil) y cables USB. Módulos comunes integran chips como DW1000 o DW3000.
- Entorno de Desarrollo: El Arduino IDE es la plataforma recomendada para programar los ESP32, junto con bibliotecas específicas para UWB como `DW1000Ranging`.
- Principio Básico: El sistema funciona midiendo el tiempo de vuelo de las señales UWB entre la etiqueta móvil y varias anclas fijas para calcular la distancia (ranging) y, posteriormente, la posición (usualmente mediante trilateración).
¿Qué es UWB y Por Qué Usarlo con ESP32?
Entendiendo la Tecnología y sus Ventajas
Ultra Wideband (UWB) es una tecnología de radio de corto alcance que utiliza pulsos de energía muy cortos sobre un espectro de frecuencia muy amplio (generalmente superior a 500 MHz, llegando a varios GHz). A diferencia de WiFi o Bluetooth que operan en canales estrechos, UWB distribuye la señal, lo que le permite:
- Medir distancias con alta precisión: Al usar pulsos muy cortos, UWB puede determinar el tiempo de vuelo de la señal con gran exactitud, traduciéndose en mediciones de distancia centimétricas.
- Resistir interferencias: Su bajo nivel de potencia y amplio espectro la hacen robusta frente a interferencias de otras señales inalámbricas.
- Bajo consumo energético: Los pulsos cortos y de baja potencia hacen que los dispositivos UWB sean eficientes energéticamente.
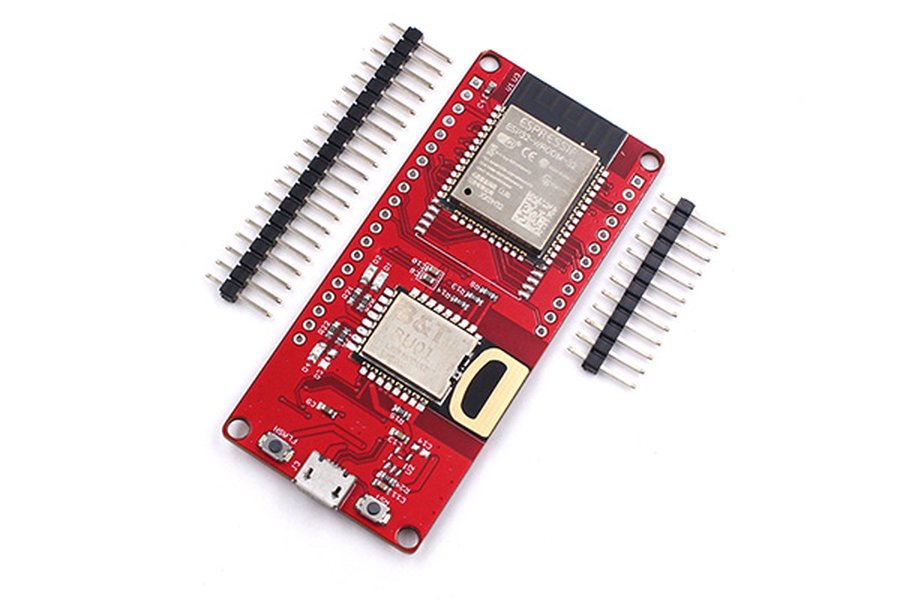
El ESP32, por su parte, es un microcontrolador potente y económico con WiFi y Bluetooth integrados. Combinar ESP32 con UWB permite crear sistemas de localización y ranging conectados, capaces de enviar datos a la nube, a aplicaciones móviles o a otros sistemas fácilmente. Módulos como los de Makerfabs integran ambos (ESP32 y chip UWB) en una sola placa, simplificando enormemente el desarrollo.
Un ejemplo de módulo que integra ESP32 y un chip UWB DW1000.
Selección del Hardware Esencial
Componentes Necesarios para tu Proyecto UWB
Para montar un sistema UWB básico, necesitarás los siguientes componentes:
- Módulos ESP32 UWB: Al menos dos. Uno funcionará como Ancla (posición fija) y otro como Etiqueta (dispositivo a localizar). Puedes necesitar más anclas (mínimo 3) para una localización 2D precisa mediante trilateración.
- Cables USB: Para programar los ESP32 y, opcionalmente, alimentarlos durante las pruebas. Se recomiendan cables USB Tipo-C si tus módulos usan ese conector.
- Fuente de Alimentación: Para operación independiente, puedes usar baterías o adaptadores de corriente de 5V.
- Computadora: Con el Arduino IDE instalado para programar los módulos.
Módulos UWB Populares con ESP32
Existen varios módulos que facilitan la integración de UWB con ESP32:
- ESP32 DW1000 UWB: Basado en el chip DW1000 de Decawave (ahora Qorvo). Es una opción popular y bien documentada, ideal para empezar. Ofrece buena precisión y alcance (hasta ~200m en condiciones ideales, aunque afectado por obstáculos).
- ESP32 DW3000 UWB: Utiliza el chip DW3000, más moderno y eficiente energéticamente (consume ~1/3 de la energía del DW1000). Es interoperable con el chip U1 de Apple y opera en canales UWB 5 (6.5GHz) y 9 (8GHz), ofreciendo compatibilidad global. Puede manejar sistemas más complejos (hasta 8 anclas y 32 etiquetas según el fabricante).
- ESP32 UWB Pro: Una variante que a menudo incluye un amplificador de potencia (PA) y un amplificador de bajo ruido (LNA) para extender el alcance significativamente (hasta 200-500 metros en línea de vista) y a veces una pantalla OLED integrada.
Configuración Mínima: Anclas y Etiquetas
La configuración más simple para probar el ranging (medición de distancia) requiere dos módulos: uno programado como Ancla y otro como Etiqueta. Para la localización (determinar coordenadas X, Y), necesitarás al menos 3 Anclas en posiciones conocidas y una Etiqueta.
- Ancla (Anchor): Dispositivo UWB con una posición fija y conocida. Actúa como punto de referencia.
- Etiqueta (Tag): Dispositivo UWB móvil cuya posición se desea determinar midiendo la distancia a las anclas.
Configuración del Entorno de Software
Preparando Arduino IDE para ESP32 y UWB
El Arduino IDE es una herramienta accesible para programar los módulos ESP32 UWB. Sigue estos pasos para configurarlo:
Instalación de Herramientas ESP32
- Abre Arduino IDE. Ve a `Archivo > Preferencias`.
- En el campo "Gestor de URLs Adicionales de Tarjetas", añade la siguiente URL para el soporte de ESP32:
https://raw.githubusercontent.com/espressif/arduino-esp32/gh-pages/package_esp32_dev_index.json - Haz clic en "OK".
- Ve a `Herramientas > Placa > Gestor de Tarjetas`.
- Busca "esp32" e instala el paquete "esp32 by Espressif Systems".
- Una vez instalado, selecciona tu placa específica (p. ej., "ESP32 Dev Module") en `Herramientas > Placa > ESP32 Arduino`.
Instalación de Bibliotecas UWB
- Ve a `Programa > Incluir Librería > Administrar Bibliotecas`.
- Busca la biblioteca `DW1000` o `DW1000Ranging`. Una opción popular es la biblioteca `arduino-dw1000` de Thotro. Instálala. (Nota: Asegúrate de que sea compatible con ESP32).
- Si usas un módulo DW3000, podrías necesitar una biblioteca específica para él o adaptaciones sobre la de DW1000. Consulta la documentación de tu módulo o busca bibliotecas como `DW3XXX Arduino`.
Modificación de Bibliotecas (Importante)
Algunas bibliotecas DW1000 genéricas pueden requerir pequeñas modificaciones para compilar correctamente con la arquitectura ESP32 (por ejemplo, ajustes en la gestión de pines SPI o interrupciones). Consulta la documentación de tu módulo ESP32 UWB o los repositorios de GitHub asociados, ya que a menudo proporcionan instrucciones específicas o versiones ya parcheadas de la biblioteca.
Proceso Paso a Paso para Ensamblar tu Sistema UWB
Desde la Conexión hasta las Pruebas
Paso 1: Conexión Física
Si estás utilizando módulos ESP32 UWB integrados (como los de Makerfabs), la conexión entre el ESP32 y el chip UWB ya está hecha. Solo necesitas conectar el módulo a tu PC mediante USB. Si usas un módulo UWB separado (como un DWM1000) con una placa ESP32 estándar, deberás conectarlos manualmente, generalmente a través de la interfaz SPI (pines MOSI, MISO, SCK, CS) y un pin de interrupción (IRQ). Consulta las hojas de datos de ambos componentes para el pinout correcto.
Paso 2: Calibración de la Antena
Este es un paso crucial para obtener mediciones de distancia precisas. El retardo de la antena (Antenna Delay) compensa el tiempo que tarda la señal en propagarse a través de la propia antena y los circuitos asociados. Sin una calibración correcta, las mediciones de distancia tendrán un error constante.
- Las bibliotecas suelen tener un valor de retardo predeterminado (ej., `16385` para PRF de 64 MHz en DW1000). Este valor es un punto de partida.
- La calibración fina implica medir una distancia conocida con precisión y ajustar el valor del retardo en el código (`DW1000.setAntennaDelay(valor);`) hasta que la distancia reportada por el sistema coincida con la real.
- Este valor puede variar ligeramente entre módulos, incluso del mismo tipo.
La calibración precisa del retardo de antena es fundamental para la exactitud del sistema UWB.
Paso 3: Programación de Anclas y Etiquetas
Carga códigos distintos en los módulos designados como Anclas y Etiquetas. Utiliza los ejemplos proporcionados por la biblioteca UWB como base.
Código de Ancla (Anchor) - Conceptual
El código de la ancla inicializa el módulo en modo Ancla, le asigna una dirección única y espera a recibir señales de las etiquetas para responder.
#include <DW1000Ranging.h>
// Define la dirección única para esta ancla
#define ANCHOR_ADD "AA:BB:CC:01:00:00"
void setup() {
Serial.begin(115200);
DW1000Ranging.initCommunication(); // Inicializa pines SPI, etc.
// Configura callbacks para eventos (opcional)
DW1000Ranging.attachNewRange(newRange);
// Inicia el módulo como Ancla
DW1000Ranging.startAsAnchor(ANCHOR_ADD, DW1000.MODE_LONGDATA_RANGE_LOWPOWER);
Serial.println("Anchor started.");
}
void loop() {
// La biblioteca maneja la comunicación en segundo plano
DW1000Ranging.loop();
}
// Función callback cuando se detecta una nueva distancia
void newRange() {
Serial.print("Distancia desde TAG: ");
Serial.print(DW1000Ranging.getDistantDevice()->getShortAddress(), HEX);
Serial.print(" = ");
Serial.print(DW1000Ranging.getRange());
Serial.println(" m");
}
Código de Etiqueta (Tag) - Conceptual
El código de la etiqueta inicializa el módulo en modo Etiqueta, le asigna una dirección y periódicamente busca anclas cercanas para medir la distancia a ellas.
#include <DW1000Ranging.h>
// Define la dirección única para esta etiqueta
#define TAG_ADD "DD:EE:FF:01:00:00"
void setup() {
Serial.begin(115200);
DW1000Ranging.initCommunication(); // Inicializa pines SPI, etc.
// Configura callbacks
DW1000Ranging.attachNewRange(newRange);
DW1000Ranging.attachInactiveDevice(inactiveDevice);
// Inicia el módulo como Etiqueta
DW1000Ranging.startAsTag(TAG_ADD, DW1000.MODE_LONGDATA_RANGE_LOWPOWER);
Serial.println("Tag started.");
}
void loop() {
// La biblioteca maneja el escaneo y ranging
DW1000Ranging.loop();
}
// Callback para nuevas mediciones de distancia
void newRange() {
Serial.print("Distancia a ANCHOR: ");
Serial.print(DW1000Ranging.getDistantDevice()->getShortAddress(), HEX);
Serial.print(" = ");
Serial.print(DW1000Ranging.getRange());
Serial.println(" m");
// Aquí podrías enviar los datos por WiFi/Bluetooth a un servidor/app
}
// Callback si un ancla deja de ser detectada
void inactiveDevice(DW1000Device* device) {
Serial.print("Anchor inactive: ");
Serial.println(device->getShortAddress(), HEX);
}
Nota: Estos códigos son conceptuales. Debes adaptarlos según la biblioteca específica que uses y tus necesidades (configuración de pines, modo de operación UWB, manejo de múltiples anclas, etc.).
Paso 4: Pruebas de Ranging (Medición de Distancia)
Con una Ancla y una Etiqueta programadas, colócalas a una distancia conocida (p. ej., medida con una cinta métrica). Abre el Monitor Serie en el Arduino IDE para ambos dispositivos. La Etiqueta debería empezar a detectar la Ancla y mostrar la distancia medida. Compara esta distancia con la real. Si hay una desviación constante significativa, ajusta el `Antenna Delay` en el código de ambos dispositivos y vuelve a probar.
Paso 5: Implementación del Sistema de Posicionamiento
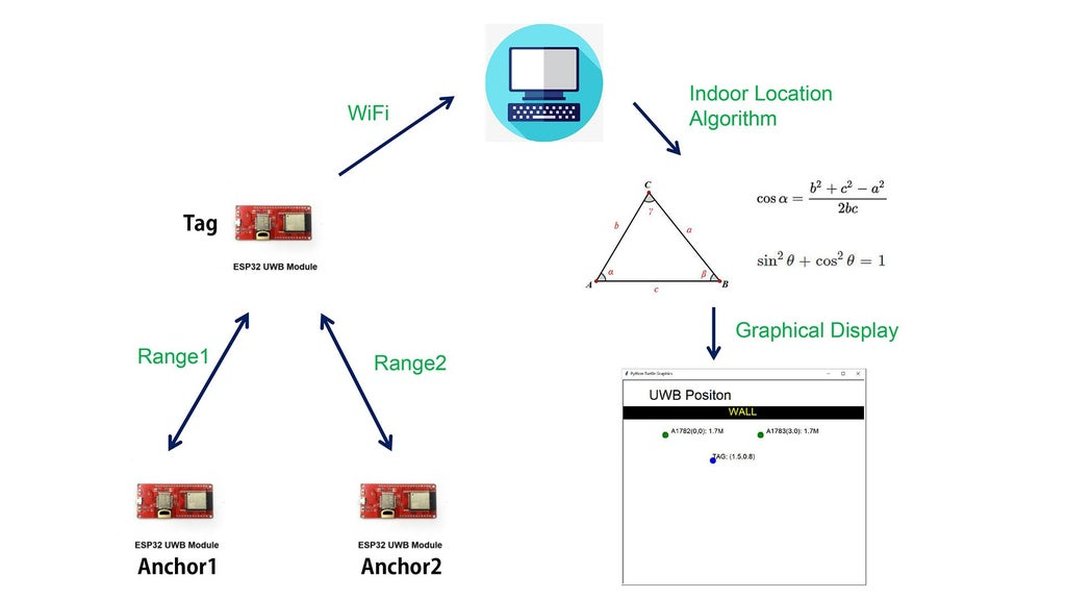
Un sistema de posicionamiento interior UWB utiliza múltiples anclas fijas para determinar la ubicación de una etiqueta móvil.
- Colocación de Anclas: Instala al menos 3 anclas en posiciones fijas y conocidas dentro del área de cobertura (p. ej., las esquinas de una habitación). Registra sus coordenadas (X, Y, Z si es 3D).
- Cálculo de Posición (Trilateración): La etiqueta mide la distancia a cada ancla visible. Con al menos 3 distancias (d1, d2, d3) a anclas conocidas (A1, A2, A3), se puede calcular la posición (x, y) de la etiqueta resolviendo el sistema de ecuaciones de las circunferencias (o esferas en 3D) centradas en cada ancla con radio igual a la distancia medida. Existen algoritmos y bibliotecas para realizar estos cálculos.
- Visualización (Opcional): La etiqueta puede enviar las distancias medidas o su posición calculada (vía WiFi o Bluetooth del ESP32) a un servidor central, una aplicación móvil o un programa en PC (usando Python, Processing, Unity, etc.) para mostrar la ubicación en un mapa o gráfico en tiempo real.
Visualización de Capacidades: Comparativa de Chips UWB
DW1000 vs. DW3000 en un Vistazo
Para ayudarte a elegir el módulo adecuado, este gráfico compara las características relativas de los chips UWB DW1000 y DW3000 comúnmente encontrados en módulos ESP32 UWB.
Este gráfico muestra que el DW3000 generalmente ofrece mejor precisión, eficiencia energética e interoperabilidad, mientras que el DW1000 puede ser ligeramente más económico y tener más recursos disponibles para principiantes debido a su mayor tiempo en el mercado.
Mapa Mental del Proceso de Creación del Sistema UWB
Una Visión General de los Pasos Clave
Este mapa mental resume las etapas principales involucradas en la construcción de tu sistema UWB con ESP32, desde la selección inicial hasta la prueba final.
Este esquema visual te ayuda a seguir la secuencia lógica del proyecto y a no olvidar ningún paso importante.
Video Demostrativo: Primeros Pasos con ESP32 UWB
Observa el Proceso en Acción
Para complementar esta guía, el siguiente video (en inglés) ofrece una introducción práctica al uso de una placa ESP32 UWB, mostrando la configuración inicial y las pruebas básicas de ranging. Es un excelente punto de partida visual para familiarizarte con el hardware y el software.
Este video cubre aspectos como la presentación de la placa, la configuración del entorno Arduino y la ejecución de ejemplos de código para medir distancias entre dos módulos ESP32 UWB, lo cual es fundamental antes de pasar a sistemas de posicionamiento más complejos.
Tabla Comparativa: Módulos UWB ESP32
Características Clave de un Vistazo
La siguiente tabla resume las características principales de los tipos de módulos ESP32 UWB más comunes para ayudarte a decidir cuál se adapta mejor a tu proyecto.
| Característica | ESP32 DW1000 | ESP32 DW3000 | ESP32 UWB Pro (Basado en DW1000) |
|---|---|---|---|
| Chip UWB | DW1000 | DW3000 | DW1000 |
| Precisión Típica | ~10-30 cm | ~10 cm (o mejor según configuración) | ~10-30 cm (similar a DW1000 base) |
| Alcance Máximo (Ideal) | Hasta ~200 m | Hasta ~200 m (similar o ligeramente mejor) | Hasta ~200-500+ m (con amplificador) |
| Consumo Energético | Moderado | Bajo (aprox. 1/3 del DW1000) | Alto (debido al amplificador) |
| Canales UWB Comunes | Canal 5 (6.5 GHz) | Canal 5 (6.5 GHz), Canal 9 (8 GHz) | Canal 5 (6.5 GHz) |
| Interoperabilidad Apple U1 | No directa | Sí (con firmware adecuado) | No directa |
| Ideal Para | Proyectos introductorios, PoC | Eficiencia energética, interoperabilidad, nuevos desarrollos | Aplicaciones de largo alcance, exteriores |
Considera estos factores junto con el costo y la disponibilidad de bibliotecas y soporte al elegir tu hardware.
Consideraciones Adicionales y Solución de Problemas
Optimizando y Depurando tu Sistema
Optimización
- Modos de Operación: Experimenta con diferentes modos UWB (ej., `MODE_SHORTDATA_FAST_LOWPOWER`, `MODE_LONGDATA_RANGE_ACCURACY`) ofrecidos por la biblioteca para balancear alcance, precisión y consumo.
- Selección de Canal: Si usas DW3000, prueba diferentes canales (5 o 9) para ver cuál funciona mejor en tu entorno, minimizando interferencias.
- Consumo: Implementa modos de bajo consumo (sleep) en el ESP32 y el chip UWB cuando no se necesiten mediciones activas, especialmente para etiquetas alimentadas por batería.
Interferencias y Alcance
- Línea de Vista (LOS): UWB funciona mejor con línea de vista directa entre anclas y etiquetas. Obstáculos (paredes, muebles, personas) pueden atenuar o bloquear la señal, reduciendo el alcance y la precisión.
- Reflejos (Multipath): En interiores, las señales UWB pueden rebotar en superficies, creando múltiples caminos (multipath). Algoritmos avanzados pueden mitigar esto, pero es una fuente inherente de error.
- Ruido Electromagnético: Fuentes cercanas de ruido de RF pueden afectar el rendimiento.
Problemas Comunes
- Errores de Compilación: Asegúrate de que la biblioteca UWB es compatible con ESP32 o ha sido modificada correctamente. Verifica que tienes instaladas todas las dependencias.
- Módulo No Detectado: Revisa las conexiones SPI (si usas módulo externo) y asegúrate de que los pines GPIO seleccionados no entren en conflicto con otras funciones del ESP32 (como WiFi o Bluetooth si están activos).
- Distancias Incorrectas o Inestables: La causa más probable es una calibración de antena inadecuada. Vuelve a calibrar cuidadosamente. También puede deberse a interferencias o mala colocación de las anclas.
- Alimentación Inestable: Asegúrate de que los módulos reciban suficiente corriente, especialmente los modelos Pro con amplificadores. Una alimentación inestable puede causar reinicios o comportamiento errático.
Preguntas Frecuentes (FAQ)
¿Cuántos módulos ESP32 UWB necesito como mínimo?
¿Qué precisión puedo esperar de un sistema UWB casero con ESP32?
¿Es muy complicado realizar la calibración de la antena?
¿Puedo usar módulos DW3000 con las bibliotecas hechas para DW1000?
Referencias
- Getting Started with ESP32 DW1000 UWB (Ultra Wideband) Module - How To Electronics
- ESP32 UWB Indoor Positioning Test - Instructables
- Ranging & Localization with ESP32 UWB DW3000 Module - How To Electronics
- ESP32 DW3000 UWB Module Achieving 500m Range - How To Electronics
- arduino-dw1000 library by thotro - GitHub
- KunYi/esp32-uwb-positioning-system - GitHub
- ESP32 UWB Antenna Delay Calibrating - Makerfabs
Recomendados
Last updated April 13, 2025