
ESP8266: TTL-Signalflanken präzise in Impulse umwandeln
Nutzen Sie Interrupts für eine reaktionsschnelle Erkennung von HIGH- und LOW-Wechseln und erzeugen Sie zuverlässige Ausgangsimpulse.
Highlights
- Effiziente Flankenerkennung: Lernen Sie, wie Sie mit externen Interrupts auf dem ESP8266 sowohl steigende (LOW zu HIGH) als auch fallende (HIGH zu LOW) Flanken eines TTL-Signals zuverlässig detektieren.
- Präzise Impulserzeugung: Implementieren Sie Arduino-Code, der bei jeder erkannten Signalflanke einen kurzen, definierbaren Impuls auf einem Ausgangspin generiert.
- Robuster Code: Verstehen Sie die Bedeutung von
volatile-Variablen und kritischen Abschnitten bei der Interrupt-Programmierung für stabile Ergebnisse.
Die Herausforderung: TTL-Flanken in Impulse umwandeln
In vielen digitalen Projekten ist es notwendig, auf Änderungen eines Eingangssignals zu reagieren. Ein typisches Beispiel ist ein TTL-Signal (Transistor-Transistor-Logik), das zwischen einem HIGH-Pegel (oft 3.3V oder 5V) und einem LOW-Pegel (nahe 0V) wechselt. Die Aufgabe besteht darin, nicht den Zustand selbst, sondern den Moment des Wechsels – die sogenannte Signalflanke – zu erkennen und daraufhin eine kurze Aktion auszulösen, wie das Senden eines Impulses.
Der ESP8266 ist ein leistungsfähiger Mikrocontroller mit WLAN-Fähigkeiten, der sich hervorragend für solche Aufgaben eignet. Er kann digitale Signale lesen und schreiben und bietet die Möglichkeit, auf externe Ereignisse mittels Interrupts zu reagieren. Dies ist besonders nützlich, um Signaländerungen schnell und effizient zu verarbeiten, ohne den Hauptprogrammfluss ständig durch Abfragen (Polling) zu blockieren.
Warum Interrupts statt Polling?
Während man den Zustand eines Eingangspins auch kontinuierlich in der loop()-Funktion abfragen könnte (Polling), hat die Verwendung von Interrupts entscheidende Vorteile:
- Reaktionsgeschwindigkeit: Interrupts reagieren nahezu sofort auf eine Signaländerung, unabhängig davon, was der Hauptprogrammcode gerade tut. Polling kann Änderungen verpassen, wenn die
loop()-Funktion durch andere Aufgaben oder Verzögerungen blockiert ist. - Effizienz: Der Prozessor muss nicht ständig den Pin-Zustand überprüfen, was Rechenzeit spart und den ESP8266 für andere Aufgaben freihält.
- Zuverlässigkeit: Besonders bei schnellen Signalwechseln sind Interrupts zuverlässiger als Polling.
Arduino-Code für den ESP8266: Flankenerkennung mit Interrupts
Der folgende Arduino-Code für den ESP8266 nutzt einen externen Interrupt, um sowohl steigende als auch fallende Flanken an einem Eingangspin zu erkennen. Bei jeder erkannten Flanke wird ein kurzer Impuls an einem Ausgangspin erzeugt.
// Definieren der Pins für Ein- und Ausgang
const int eingangsPin = D2; // Beispiel: GPIO4 auf NodeMCU (D2) - Passen Sie dies an Ihren Aufbau an
const int ausgangsPin = D1; // Beispiel: GPIO5 auf NodeMCU (D1) - Passen Sie dies an Ihren Aufbau an
// Volatile Variablen für die Kommunikation zwischen ISR und Haupt-Loop
// 'volatile' stellt sicher, dass der Compiler die Variable nicht wegoptimiert,
// da sie sich jederzeit durch einen Interrupt ändern kann.
volatile bool flankeErkannt = false;
volatile int impulsTyp = 0; // 1 für steigende Flanke, 2 für fallende Flanke
// --- Initialisierung ---
void setup() {
Serial.begin(115200); // Serielle Kommunikation für Debugging starten
delay(100);
Serial.println("ESP8266 Flankenerkennung und Impulsgenerator");
// Eingangs-Pin konfigurieren
pinMode(eingangsPin, INPUT);
// Optional: INPUT_PULLUP verwenden, wenn das externe Signal keinen eigenen Pull-up hat
// pinMode(eingangsPin, INPUT_PULLUP);
// Ausgangs-Pin konfigurieren und initial auf LOW setzen
pinMode(ausgangsPin, OUTPUT);
digitalWrite(ausgangsPin, LOW);
// Interrupt an den Eingangs-Pin anhängen
// digitalPinToInterrupt() wandelt die Pin-Nummer in die Interrupt-Nummer um
// CHANGE: Löst den Interrupt bei jeder Pegeländerung aus (steigend und fallend)
attachInterrupt(digitalPinToInterrupt(eingangsPin), handleFlanke, CHANGE);
}
// --- Hauptschleife ---
void loop() {
// Prüfen, ob die ISR eine Flanke signalisiert hat
if (flankeErkannt) {
bool aktuelleFlankeErkannt;
int aktuellerImpulsTyp;
// --- Kritischer Abschnitt ---
// Interrupts vorübergehend deaktivieren, um die gemeinsamen Variablen sicher zu lesen.
// Dies verhindert Probleme, falls ein Interrupt genau während des Lesens auftritt.
noInterrupts();
aktuelleFlankeErkannt = flankeErkannt;
aktuellerImpulsTyp = impulsTyp;
flankeErkannt = false; // Flag zurücksetzen, damit der Impuls nur einmal generiert wird
interrupts();
// --- Ende des kritischen Abschnitts ---
// Nur wenn das Flag gesetzt war, den Impuls generieren
if (aktuelleFlankeErkannt) {
if (aktuellerImpulsTyp == 1) {
Serial.println("Steigende Flanke erkannt - erzeuge Impuls");
// Kurzen Impuls für steigende Flanke generieren
digitalWrite(ausgangsPin, HIGH);
delayMicroseconds(100); // Impulsdauer in Mikrosekunden (anpassbar)
digitalWrite(ausgangsPin, LOW);
} else if (aktuellerImpulsTyp == 2) {
Serial.println("Fallende Flanke erkannt - erzeuge Impuls");
// Kurzen Impuls für fallende Flanke generieren
digitalWrite(ausgangsPin, HIGH);
delayMicroseconds(100); // Impulsdauer in Mikrosekunden (anpassbar)
digitalWrite(ausgangsPin, LOW);
}
}
}
// Hier kann anderer Code stehen, der nicht zeitkritisch ist
// z.B. Sensoren auslesen, Daten senden etc.
}
// --- Interrupt Service Routine (ISR) ---
// Diese Funktion wird automatisch aufgerufen, wenn der Interrupt am eingangsPin ausgelöst wird.
// WICHTIG: ISRs sollten so kurz und schnell wie möglich sein!
// Vermeiden Sie hier delay(), Serial.print() oder komplexe Berechnungen.
void handleFlanke() {
// Den aktuellen Zustand des Pins lesen, um die Art der Flanke zu bestimmen
if (digitalRead(eingangsPin) == HIGH) {
// Der Pin ist jetzt HIGH, also war es eine steigende Flanke
impulsTyp = 1;
} else {
// Der Pin ist jetzt LOW, also war es eine fallende Flanke
impulsTyp = 2;
}
// Flag setzen, um der loop() mitzuteilen, dass eine Flanke erkannt wurde
flankeErkannt = true;
}
Code-Erklärung
Globale Variablen
eingangsPin/ausgangsPin: Definieren die verwendeten GPIO-Pins des ESP8266. Passen Sie die D-Nummern (NodeMCU-Syntax) oder GPIO-Nummern an Ihr Board an.flankeErkannt: Einvolatile booleanFlag, das von der ISR auftruegesetzt wird, wenn eine Flanke erkannt wurde. Dieloop()-Funktion prüft dieses Flag.impulsTyp: Einevolatile intVariable, die speichert, ob eine steigende (1) oder fallende (2) Flanke erkannt wurde.
setup()
- Initialisiert die serielle Kommunikation für Debugging-Ausgaben.
- Konfiguriert die Pins mittels
pinMode()als Eingang bzw. Ausgang. - Setzt den Ausgangspin initial auf LOW.
attachInterrupt(): Bindet die FunktionhandleFlankean den Interrupt deseingangsPin. Der ModusCHANGEsorgt dafür, dass der Interrupt bei *jeder* Pegeländerung ausgelöst wird.
loop()
- Prüft kontinuierlich, ob das
flankeErkanntFlag gesetzt ist. - Kritischer Abschnitt: Wenn das Flag gesetzt ist, werden Interrupts mit
noInterrupts()kurzzeitig deaktiviert. Dies ist wichtig, um dievolatile-Variablen (flankeErkannt,impulsTyp) sicher zu lesen, ohne dass sie gleichzeitig von der ISR geändert werden können. Nach dem Lesen und Zurücksetzen des Flags werden Interrupts mitinterrupts()wieder aktiviert. - Basierend auf dem gelesenen
aktuellerImpulsTypwird eine Debug-Meldung ausgegeben. - Ein kurzer HIGH-Impuls wird am
ausgangsPinerzeugt: Pin auf HIGH setzen, eine kurze Pause mitdelayMicroseconds()einlegen, Pin wieder auf LOW setzen. Die Dauer (hier 100 Mikrosekunden) kann angepasst werden.
handleFlanke() (Interrupt Service Routine - ISR)
- Diese Funktion wird automatisch bei einer Pegeländerung am
eingangsPinaufgerufen. - Sie liest den *aktuellen* Zustand des Pins mit
digitalRead(). Wenn der Pin HIGH ist, muss es eine steigende Flanke gewesen sein; wenn er LOW ist, eine fallende. - Setzt den
impulsTypentsprechend. - Setzt das
flankeErkanntFlag auftrue, um dieloop()-Funktion zu informieren.
Hardware-Setup und Überlegungen
Pin-Verbindungen
- Verbinden Sie die Signalquelle (Ihr TTL-Signal) mit dem als
eingangsPindefinierten GPIO des ESP8266 (im Beispiel D2 / GPIO4). - Verbinden Sie den als
ausgangsPindefinierten GPIO (im Beispiel D1 / GPIO5) mit dem Gerät, das die Impulse empfangen soll. - Stellen Sie sicher, dass der ESP8266 und das sendende/empfangende Gerät eine gemeinsame Masse (GND) haben.
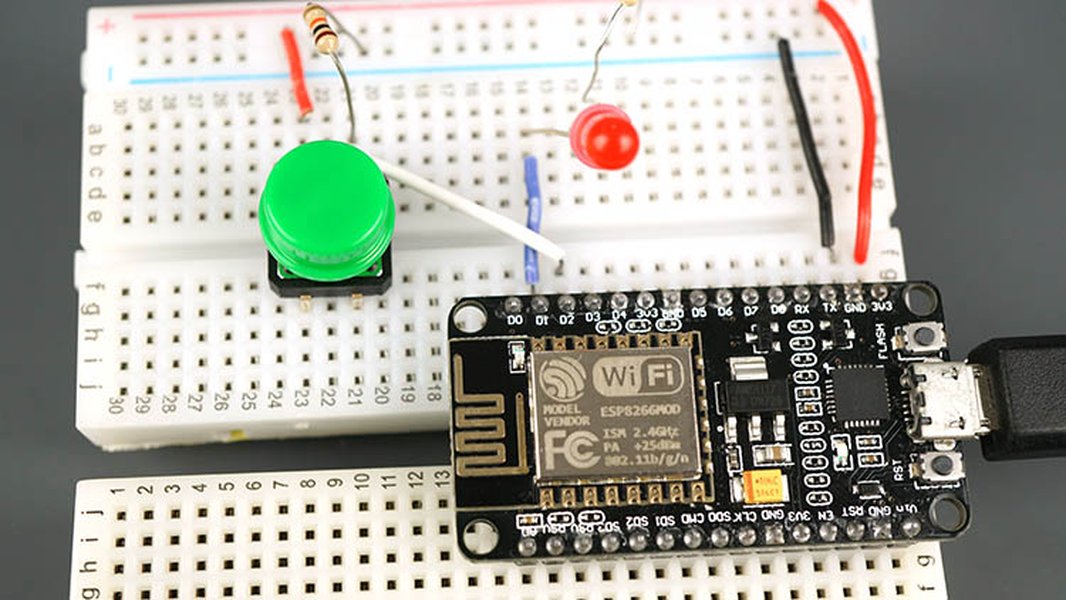
Beispielhafter Aufbau mit ESP8266 NodeMCU für digitale Ein- und Ausgänge.
Spannungspegel (TTL und ESP8266)
- Der ESP8266 arbeitet mit einer Logikspannung von 3.3V. Seine GPIOs sind in der Regel nicht 5V-tolerant.
- Wenn Ihr TTL-Signal von einem 5V-Gerät kommt, müssen Sie unbedingt einen Logic Level Converter (Spannungspegelwandler) zwischen dem Signal und dem ESP8266-Eingangspin schalten, um den ESP8266 nicht zu beschädigen.
- Wenn das Signal bereits 3.3V-Logik verwendet, können Sie es direkt verbinden.
Pull-Up/Pull-Down-Widerstände
- Wenn das TTL-Signal nicht aktiv HIGH und LOW treibt (z. B. Open-Collector-Ausgang), benötigen Sie möglicherweise einen Pull-Up-Widerstand (für Signale, die standardmäßig LOW sind und auf HIGH gezogen werden müssen) oder einen Pull-Down-Widerstand (umgekehrt).
- Der ESP8266 verfügt über interne Pull-Up-Widerstände, die Sie aktivieren können, indem Sie den Pin-Modus auf
INPUT_PULLUPsetzen. Dies ist nützlich, wenn das Signal im HIGH-Zustand "schwebend" wäre.
Impulsdauer anpassen
Die Dauer des Ausgangsimpulses wird durch den Wert in delayMicroseconds(100) bestimmt. Ändern Sie die Zahl (100 Mikrosekunden im Beispiel), um die Impulsbreite nach Bedarf anzupassen. Beachten Sie, dass sehr kurze Impulse möglicherweise von nachgeschalteten Geräten nicht zuverlässig erkannt werden.
Visualisierung des Prozesses
Die folgende Mindmap verdeutlicht den Ablauf von der Signaleingabe bis zur Impulsausgabe mithilfe der Interrupt-Methode:
Vergleich: Interrupts vs. Polling für Flankenerkennung
Die Wahl zwischen Interrupts und Polling hängt von den Anforderungen der Anwendung ab. Für die schnelle und zuverlässige Erkennung von Signalflanken, wie in diesem Fall gefordert, sind Interrupts meist die bessere Wahl. Das folgende Diagramm veranschaulicht die Stärken und Schwächen beider Methoden in diesem Kontext:
Wie das Diagramm zeigt, überzeugen Interrupts durch ihre hohe Reaktionsgeschwindigkeit und CPU-Effizienz sowie ihre Zuverlässigkeit bei schnellen Signalen. Polling ist einfacher zu implementieren, kann aber bei der Reaktionszeit und Effizienz Nachteile haben.
Zusammenfassung der Konfiguration
Die folgende Tabelle fasst die wichtigsten Parameter und Funktionen des vorgestellten Codes zusammen:
| Parameter / Funktion | Beschreibung | Beispielwert / Einstellung |
|---|---|---|
| Eingangspin | GPIO-Pin, der das TTL-Signal empfängt | const int eingangsPin = D2; (GPIO4) |
| Ausgangspin | GPIO-Pin, der die Impulse ausgibt | const int ausgangsPin = D1; (GPIO5) |
| Erkennungsmethode | Mechanismus zur Erkennung der Signalflanken | Externer Interrupt (attachInterrupt) |
| Interrupt-Modus | Bedingung, wann der Interrupt ausgelöst wird | CHANGE (bei steigender und fallender Flanke) |
| ISR-Funktion | Funktion, die bei Interrupt-Auslösung ausgeführt wird | void handleFlanke() |
| Impulsdauer | Länge des HIGH-Anteils des Ausgangsimpulses | delayMicroseconds(100); (100 µs) |
| Kommunikation ISR <=> Loop | Variablen zur Signalübergabe | volatile bool flankeErkannt;volatile int impulsTyp; |
| Synchronisation | Sicherstellung des korrekten Zugriffs auf geteilte Variablen | Kritischer Abschnitt mit noInterrupts() / interrupts() |
Video: Impulserzeugung mit Arduino
Obwohl dieses Video nicht spezifisch den ESP8266 behandelt, demonstriert es grundlegend, wie man mit einem Arduino (dessen Programmierkonzepte auf den ESP8266 übertragbar sind) Pulssignale erzeugt. Dies kann hilfreich sein, um das Prinzip der Impulsgenerierung mittels digitalWrite und Verzögerungen zu verstehen.
Grundlagen der Impulserzeugung mit Arduino.
FAQ: Häufig gestellte Fragen
Warum volatile für die Variablen flankeErkannt und impulsTyp verwenden?
Variablen, die sowohl innerhalb einer Interrupt Service Routine (ISR) als auch im Hauptprogramm (loop()) verwendet und verändert werden, müssen als volatile deklariert werden. Dies weist den Compiler an, keine Optimierungen für diese Variablen vorzunehmen (z.B. sie in Registern zu halten). Es stellt sicher, dass der Code immer den aktuellen Wert aus dem Speicher liest, da sich der Wert jederzeit unerwartet durch den Interrupt ändern kann.
Was genau ist ein TTL-Signal?
TTL steht für Transistor-Transistor-Logik. Es ist ein Standard für digitale Logikpegel. Traditionell definierte TTL einen LOW-Pegel als Spannung nahe 0V und einen HIGH-Pegel als Spannung nahe 5V. Heutzutage wird der Begriff oft allgemeiner für digitale Signale mit definierten HIGH- und LOW-Spannungspegeln verwendet, auch wenn diese von 5V abweichen (z.B. 3.3V-Logik, wie beim ESP8266). Wichtig ist die klare Unterscheidung zwischen zwei Zuständen.
Kann ich die Dauer des Ausgangsimpulses ändern?
Ja. Die Dauer des Impulses wird durch die Funktion delayMicroseconds() in der `loop()`-Funktion bestimmt. Ändern Sie den Wert innerhalb der Klammern (im Beispiel `100`), um die Dauer in Mikrosekunden anzupassen. Für längere Impulse können Sie auch delay() verwenden, das Millisekunden als Argument nimmt, aber beachten Sie, dass längere Verzögerungen in der `loop()` die Reaktionsfähigkeit des restlichen Codes beeinträchtigen können.
Was passiert, wenn das Eingangssignal sehr schnell wechselt oder "prellt"?
Sehr schnelle Wechsel werden durch die Interrupt-Methode gut erkannt. Wenn das Signal jedoch "prellt" (z.B. bei einem mechanischen Schalter, der beim Schließen kurzzeitig mehrmals Kontakt gibt und verliert), löst jede dieser kleinen Änderungen einen Interrupt aus und erzeugt einen Impuls. Um dies zu verhindern, müsste eine Entprell-Logik (Debouncing) hinzugefügt werden. Dies könnte durch Ignorieren von Interrupts für eine kurze Zeit nach einer erkannten Flanke geschehen, entweder in der ISR (nicht empfohlen, da sie kurz sein sollte) oder wahrscheinlicher in der `loop()`-Funktion, bevor ein neuer Impuls zugelassen wird.
Kann ich für steigende und fallende Flanken unterschiedliche Impulsdauern erzeugen?
Ja. In der `loop()`-Funktion, innerhalb des `if (aktuelleFlankeErkannt)`-Blocks, können Sie unterschiedliche Werte für `delayMicroseconds()` verwenden, je nachdem, ob `aktuellerImpulsTyp` gleich 1 (steigend) oder 2 (fallend) ist.
if (aktuellerImpulsTyp == 1) {
Serial.println("Steigende Flanke erkannt - erzeuge Impuls (100us)");
digitalWrite(ausgangsPin, HIGH);
delayMicroseconds(100); // Impuls für steigende Flanke
digitalWrite(ausgangsPin, LOW);
} else if (aktuellerImpulsTyp == 2) {
Serial.println("Fallende Flanke erkannt - erzeuge Impuls (200us)");
digitalWrite(ausgangsPin, HIGH);
delayMicroseconds(200); // Längerer Impuls für fallende Flanke
digitalWrite(ausgangsPin, LOW);
}
Empfohlene verwandte Suchen
- Wie kann ich das Prellen von Signalen bei ESP8266 Interrupts vermeiden?
- Wie verbinde ich 5V-Signale sicher mit einem ESP8266?
- Wie kann ich mit dem ESP8266 analoge Signale mittels PWM simulieren?
- Wann sollte ich Polling und wann Interrupts in Mikrocontroller-Projekten verwenden?
Referenzen
 aircircuits.wordpress.com
aircircuits.wordpress.com
 shepherdingelectrons.blogspot.com
shepherdingelectrons.blogspot.com
Last updated May 5, 2025