
Unraveling the Secrets of Loop Closure Parameters in SLAM
A Comprehensive Guide to Correlation Parameters in Robotic Navigation
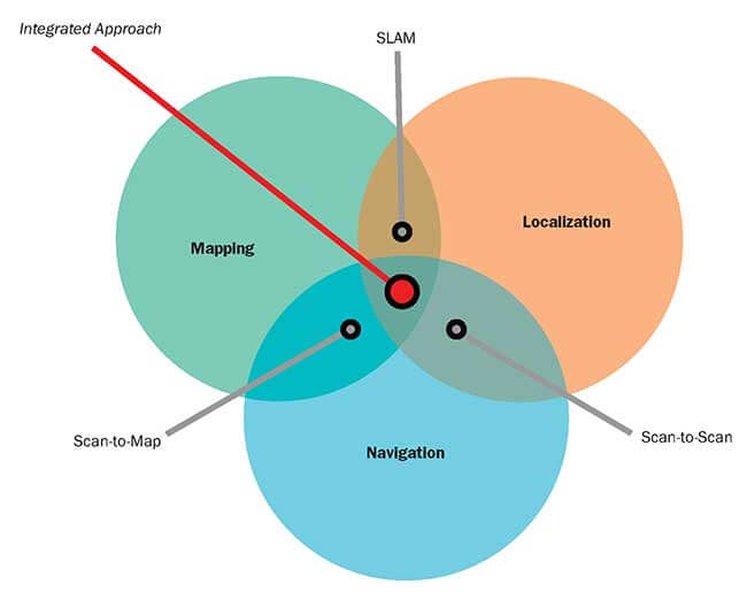
Simultaneous Localization and Mapping (SLAM) is a fundamental capability for autonomous systems like robots and self-driving cars, allowing them to build a map of an unknown environment while simultaneously keeping track of their own location within it. A critical challenge in SLAM is addressing accumulated errors (drift) that occur as the robot moves. This is where loop closure detection plays a vital role. It involves recognizing that the robot has returned to a previously visited location, enabling the SLAM system to correct the accumulated error and create a globally consistent map.
The effectiveness of loop closure detection heavily depends on various parameters that control how potential loop closures are searched for, identified, and validated. Tuning these parameters is crucial for balancing accuracy, robustness, and computational efficiency. Incorrect parameters can lead to missed loop closures (increasing drift) or false positives (introducing errors into the map).
Key Insights into Loop Closure and Parameter Tuning
- Loop Closure: This essential process in SLAM allows robots to recognize previously visited locations, significantly reducing cumulative localization errors and creating globally consistent maps by optimizing the pose graph.
- Parameter Impact: The specific parameters used in loop closure detection, such as search space dimension, resolution, and deviation tolerances, directly influence the system's ability to find true loops while avoiding false positives, impacting both the accuracy and computational cost of mapping.
- Optimization and Tuning: Finding the optimal set of parameters for loop closure detection often requires careful tuning, sometimes involving expert knowledge or automated optimization techniques, to adapt to different environments and sensor types (like LiDAR or cameras).
The Crucial Role of Loop Closure in SLAM
Loop closure detection is the process by which a mobile robot or autonomous agent determines that it has arrived at a location it has visited before. This detection is vital because, over time, SLAM algorithms that rely solely on odometry or sequential sensor data (like visual or LiDAR readings) accumulate errors, causing the estimated trajectory to drift away from the true path and the generated map to become distorted.
A robot navigating an environment, illustrating the need for accurate localization and mapping provided by SLAM.
When a loop closure is successfully identified, the system recognizes that the current sensor data corresponds to data recorded at an earlier point in time. This recognition provides a constraint – a link between the current location and the past location. By incorporating these loop closure constraints, the SLAM system can perform a global optimization of the entire map and the robot's trajectory (often through techniques like pose graph optimization or bundle adjustment). This optimization distributes the accumulated error throughout the map, resulting in a more accurate and consistent representation of the environment and a more precise localization of the robot within that map. Without effective loop closure, SLAM systems are prone to significant drift, especially in large-scale or long-duration mapping tasks.
Various methods are used for loop closure detection, including appearance-based techniques (matching visual features or descriptors from different camera views), geometric methods (matching geometric shapes or structures from LiDAR scans or point clouds), and time-based methods. The effectiveness of these methods depends on the quality and distinctiveness of the sensor data and the algorithms used for matching and verification. For instance, appearance-based methods can be affected by changing illumination or seasons, while geometric methods might struggle with feature-poor environments.
How Parameters Influence Loop Closure Detection
Loop closure detection algorithms involve several steps, including identifying potential loop closure candidates, matching features or structures between the current view and potential candidates, and verifying the geometric consistency of the match. Each of these steps often relies on tunable parameters that control thresholds, search ranges, and matching criteria. The choice of these parameters is critical because it presents a trade-off between finding true loop closures (maximizing recall) and incorrectly identifying false loop closures (minimizing precision).
Parameters determine the conditions under which a potential loop closure is considered valid enough to trigger a global map optimization. For example, they might define how similar two scenes must appear or how close two poses must be in the pose graph to be considered a match. Tuning these parameters requires careful consideration of the sensor characteristics, the environment's nature, and the specific requirements of the application. In some cases, expert knowledge is needed to manually set these parameters, while other approaches explore automated parameter optimization methods, especially for closed environments or specific datasets.
The Delicate Balance: Precision vs. Recall
In loop closure detection, precision refers to the percentage of detected loop closures that are actually true positives (correct matches), while recall refers to the percentage of true loop closures that are successfully detected.
- High Recall: A high recall is desirable to find as many loops as possible, minimizing drift. However, this often comes with a higher chance of false positives.
- High Precision: High precision is crucial to avoid corrupting the map with incorrect constraints. However, overly strict parameters can lead to low recall, missing true loops.
Parameters are the knobs that adjust this trade-off. Setting parameters too loosely increases recall but decreases precision, potentially leading to map inconsistencies or even system failure. Setting parameters too strictly increases precision but decreases recall, allowing drift to accumulate.
Deconstructing the Specific Loop Closure Parameters
The parameters provided – loop_search_space_dimension, loop_search_space_resolution, and loop_search_space_smear_deviation – likely define aspects of the search process for finding potential loop closure candidates within a certain spatial or temporal range relative to the robot's current estimated pose.
Understanding loop_search_space_dimension
Defining the Search Boundary
The parameter loop_search_space_dimension, set to a value of 8.0, most likely defines the maximum extent or radius of the area around the robot's current estimated position within which the system will search for potential loop closure candidates. This search space could be defined in meters (for a 3D space or a 2D plane) or potentially in terms of vertices in a pose graph.
A dimension of 8.0 implies that the system will only consider previous poses or keyframes that are estimated to be within an 8-unit distance (e.g., meters) of the current pose as potential loop closure partners.
- Impact of a Larger Dimension: Increasing this value expands the search area, potentially allowing the system to find loop closures that occurred further away in the robot's history or geographically further from the current location. This can increase the chances of finding true loop closures (higher recall).
- Impact of a Smaller Dimension: Decreasing this value restricts the search area. This reduces the computational cost of searching but may cause the system to miss loop closures if the robot returns to a location outside the defined radius.
- Computational Cost: Searching a larger space requires more computation as more potential candidates need to be evaluated.
Interpreting loop_search_space_resolution
Granularity of the Search Grid
The parameter loop_search_space_resolution, with a value of 0.05, likely pertains to the granularity or step size used when searching within the defined loop_search_space_dimension. If the search space is discretized, this resolution might represent the size of the grid cells. If the search involves exploring different potential relative poses between the current and candidate location, the resolution might define the step size for rotations and translations.
A resolution of 0.05 suggests a relatively fine-grained search. For example, if searching for a match within the 8.0 dimension, the system might evaluate potential matches at intervals of 0.05 units.
- Impact of a Finer Resolution: A smaller resolution (like 0.05) means the search is more thorough within the defined space. This can potentially lead to finding more accurate matches and improving the precision of the loop closure constraint.
- Impact of a Coarser Resolution: A larger resolution would make the search faster but might result in missing the optimal match or accepting a less accurate one.
- Computational Cost: Searching with a finer resolution increases the number of evaluations required within the search space, leading to higher computational load.
Analyzing loop_search_space_smear_deviation
Tolerance for Feature or Pose Matching
The parameter loop_search_space_smear_deviation, set to 0.03, is less immediately intuitive based on the name alone, but in the context of a "smear" and "deviation" within a search space, it most likely represents a tolerance or threshold related to the quality of the match found. "Smear" might refer to uncertainty, accumulated error, or a range of possible pose estimates. "Deviation" would then be the allowable difference or error.
This could manifest in several ways depending on the underlying algorithm:
- Feature Matching Tolerance: If loop closure is based on matching visual features or LiDAR points, this could be a threshold on the allowed descriptor distance, geometric error (e.g., reprojection error in vision, point-to-plane distance in LiDAR), or the number of inliers required for a valid match within the search process.
- Pose Consistency Tolerance: After finding potential feature matches, the system typically estimates the relative pose transformation between the current and candidate location. This parameter could be a tolerance on the deviation of this estimated pose from some expected value or a threshold on the geometric error after applying the transformation (e.g., maximum allowed point cloud misalignment).
- Impact of a Larger Deviation: Increasing this value makes the matching criteria more lenient. This can help find matches in challenging conditions (e.g., noisy data, slight viewpoint changes) and potentially increase recall. However, it significantly increases the risk of accepting false positive matches.
- Impact of a Smaller Deviation: Decreasing this value makes the matching criteria stricter. This reduces the chance of false positives (increasing precision) but may cause the system to reject true loop closures if the match doesn't meet the strict tolerance.
A value of 0.03 suggests a relatively tight tolerance, indicating a preference for high precision over recall in the matching step within the search space.
Putting it Together: Parameter Interplay
These three parameters work together to define the specific strategy for finding loop closures.
With loop_search_space_dimension: 8.0, loop_search_space_resolution: 0.05, and loop_search_space_smear_deviation: 0.03, the configuration implies:
- A search for loop closures will occur within an 8.0 unit radius of the current position.
- This search will evaluate potential matches at points or poses approximately 0.05 units apart within that radius.
- A potential match found during this search must meet a relatively strict matching criterion, indicated by the small 0.03 deviation tolerance, to be considered a valid candidate for further verification.
This combination suggests a configuration that performs a moderately sized search (8.0 dimension) with a fine internal granularity (0.05 resolution) and a relatively strict requirement for the quality of the potential match (0.03 deviation). Such a configuration aims to find accurate matches within a limited range, prioritizing precision in the matching step, while the resolution helps ensure the search doesn't miss close matches due to coarse sampling.
Applications in Robotics and Beyond
Loop closure detection, guided by these parameters, is fundamental to robust SLAM in various applications:
- Autonomous Navigation: Robots and self-driving cars use SLAM to build maps for path planning and navigation in unknown or dynamic environments. Accurate loop closure is essential for reliable long-term autonomy.
- Mapping: Creating consistent and accurate maps of indoor or outdoor environments for surveying, inspection, or virtual reality.
- Augmented Reality: Tracking the user's position and orientation within a real environment to overlay virtual content accurately.
- Multi-Robot Systems: Allowing multiple robots to coordinate and build a unified map by detecting inter-robot loop closures.
The specific values of loop closure parameters must often be tailored to the sensor modalities (LiDAR, camera, etc.), the characteristics of the environment (structured vs. unstructured, dynamic vs. static), and the required level of accuracy and computational resources.
Parameter Tuning Considerations
Tuning loop closure parameters is often an iterative process. Starting with default values might work in some scenarios, but optimizing them for a specific application and environment is usually necessary to achieve optimal performance. Factors influencing parameter selection include:
-
Sensor Noise and Characteristics: Noisier sensors might require larger deviation tolerances. Different sensor types (LiDAR vs. camera) necessitate different feature extraction and matching strategies, impacting relevant parameters.
-
Environment Structure: Feature-rich environments allow for stricter matching criteria, while feature-poor environments might require more lenient parameters or different detection methods. Closed environments might benefit from specific optimization approaches.
-
Computational Resources: Larger search spaces and finer resolutions increase computational load. Systems with limited processing power might need to use parameters that prioritize efficiency.
-
Required Accuracy: Applications demanding high map accuracy will require parameters that ensure high precision in loop closure detection.
Research explores methods for automatic parameter tuning, sometimes using optimization algorithms, to reduce the reliance on manual expert configuration.
Visualizing Correlation
While the parameters themselves define aspects of the search and matching process, the success of loop closure can sometimes be visualized using concepts like correlation maps. A correlation map, in a broader sense, illustrates the degree of relationship or similarity between different data points or variables. In the context of loop closure, one could imagine visualizing the correlation or similarity score between the current sensor data and potential candidates within the search space defined by the parameters. Higher correlation values in the map would indicate likely loop closure locations.
Below is a general example of how parameters and their impact might be conceptually represented or related in a table, summarizing the parameters you provided:
| Parameter Name | Value | Potential Interpretation | Impact on Search | Impact on Match Quality | Impact on Computational Cost |
|---|---|---|---|---|---|
loop_search_space_dimension |
8.0 | Maximum radius/extent of search around current pose | Defines search volume (Larger value = larger volume) | Indirect (Larger volume = more candidates) | Higher (Larger volume = more comparisons) |
loop_search_space_resolution |
0.05 | Granularity/step size within the search space | Defines search density (Smaller value = denser search) | Potential for more accurate match location | Higher (Denser search = more evaluations) |
loop_search_space_smear_deviation |
0.03 | Tolerance for feature/pose matching quality | N/A (Applied after identifying candidates within space) | Defines match strictness (Smaller value = stricter match) | Lower (Stricter match = fewer accepted candidates for verification) |
This table provides a simplified view; the actual implementation and interaction of these parameters can be more complex depending on the specific SLAM framework.
Further Exploration: Parameter Optimization
The challenge of parameter tuning has led to research into methods for optimizing these values automatically. Techniques like multi-objective optimization can be used to find parameter sets that balance competing objectives, such as maximizing map quality (accuracy) while minimizing computational resources or failure rates. These methods often require evaluating the performance of the SLAM system with different parameter settings on relevant datasets.
This video discusses the importance of parameter optimization, a concept highly relevant to tuning loop closure parameters for improved SLAM performance.
This video titled "Parameter Optimization for Loop Closure Detection in Closed..." highlights the significance of finding the right parameter values. It underscores that parameters are crucial for the performance of localization and mapping algorithms and that tuning them effectively, often without prior information or expert knowledge, is a key area of research for truly autonomous systems. The video context relates directly to the challenge presented by parameters like the ones you provided, emphasizing that their optimal values are not universal and often require adaptation.
Frequently Asked Questions
What is the primary goal of loop closure detection in SLAM?
The primary goal is to recognize that the robot has returned to a previously visited location. This detection is crucial for identifying cumulative errors (drift) in the estimated trajectory and map. Once a loop closure is confirmed, the SLAM system can optimize the pose graph or map, distributing the accumulated error and creating a globally consistent and accurate representation of the environment.
Why are loop closure parameters important?
Loop closure parameters are important because they control the sensitivity and specificity of the detection process. They determine how aggressively the system searches for potential loops, how similar potential matches must be, and the criteria for validating a loop closure. Setting these parameters correctly is essential for balancing the detection of true loops (to minimize drift) and the rejection of false positives (to prevent map corruption). Poorly tuned parameters can significantly degrade SLAM performance.
Are these specific parameter names and values universal across all SLAM systems?
No, the specific names and exact meanings of loop closure parameters can vary significantly between different SLAM implementations and frameworks (e.g., RTAB-Map, ORB-SLAM, Karto SLAM, LidarView). While concepts like search space and matching tolerance are common, their parametrization and the specific terminology used are often unique to each system. The parameters provided likely correspond to a specific SLAM library or application configuration.
How does parameter tuning relate to precision and recall?
Parameter tuning directly influences the trade-off between precision and recall in loop closure detection. Looser parameters typically increase recall (finding more potential loops) but decrease precision (accepting more false positives). Stricter parameters typically increase precision (fewer false positives) but decrease recall (missing true loops). Finding the optimal parameters involves balancing these two metrics based on the application's needs.
What happens if loop closure parameters are set incorrectly?
If parameters are set too loosely, the system may accept many false positive loop closures, leading to significant distortions and inconsistencies in the map, potentially causing navigation failures. If parameters are set too strictly, the system may miss many true loop closures, allowing drift to accumulate unchecked, resulting in an increasingly inaccurate map and poor localization performance, especially over long trajectories.
References
Last updated April 18, 2025