
使用 PyTorch 和 PPO 算法训练 Gymnasium 的 CartPole-v1 环境的完整指南
简介
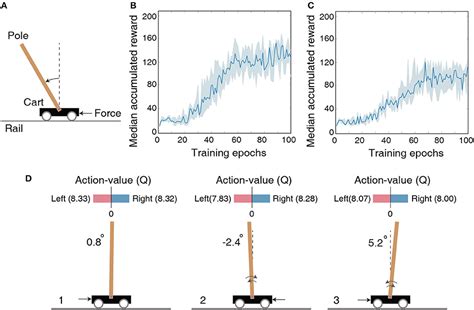
强化学习(Reinforcement Learning, RL)是一种使代理通过与环境互动来学习最佳策略的方法。在众多强化学习算法中,近端策略优化(Proximal Policy Optimization, PPO)因其简单性和高效性而受到广泛应用。本指南将详细介绍如何使用 Python 和 PyTorch 库,通过 PPO 算法对 Gymnasium 的 CartPole-v1 环境进行训练。
安装所需库
首先,确保安装了必要的 Python 库。可以使用以下命令安装:
pip install gymnasium torch numpy导入必要的库
在开始编写代码之前,需要导入以下库:
import gymnasium as gym
import torch
import torch.nn as nn
import torch.optim as optim
import numpy as np
from torch.distributions import Categorical
定义超参数
为了便于调整模型性能,我们定义了一些超参数:
# 超参数
NUM_EPISODES = 1000 # 训练回合数
MAX_STEPS = 200 # 每回合最大步数
GAMMA = 0.99 # 折扣因子
LAMBDA = 0.95 # GAE参数
CLIP_EPS = 0.2 # PPO剪切参数
LR = 0.001 # 学习率
UPDATE_EPOCHS = 10 # 更新次数
BATCH_SIZE = 64 # 批量大小
定义策略网络(Policy Network)
策略网络负责根据当前状态输出每个可能动作的概率分布。我们使用一个简单的全连接神经网络来实现策略网络。
class PolicyNetwork(nn.Module):
def __init__(self, state_dim, action_dim):
super(PolicyNetwork, self).__init__()
self.fc1 = nn.Linear(state_dim, 128)
self.fc2 = nn.Linear(128, 128)
self.action_head = nn.Linear(128, action_dim)
def forward(self, x):
x = torch.relu(self.fc1(x))
x = torch.relu(self.fc2(x))
action_probs = torch.softmax(self.action_head(x), dim=-1)
return action_probs
定义价值网络(Value Network)
价值网络用于估计当前状态的价值,以帮助计算优势函数。结构类似于策略网络,但输出为单一的价值估计。
class ValueNetwork(nn.Module):
def __init__(self, state_dim):
super(ValueNetwork, self).__init__()
self.fc1 = nn.Linear(state_dim, 128)
self.fc2 = nn.Linear(128, 128)
self.value_head = nn.Linear(128, 1)
def forward(self, x):
x = torch.relu(self.fc1(x))
x = torch.relu(self.fc2(x))
state_value = self.value_head(x)
return state_value
定义 PPO 智能体
PPO 智能体包含策略网络和价值网络,并实现了选择动作、存储轨迹、计算优势以及更新网络的功能。
class PPOAgent:
def __init__(self, state_dim, action_dim, lr, gamma, lambda_, clip_eps):
self.gamma = gamma
self.lambda_ = lambda_
self.clip_eps = clip_eps
self.policy_net = PolicyNetwork(state_dim, action_dim)
self.value_net = ValueNetwork(state_dim)
self.policy_optimizer = optim.Adam(self.policy_net.parameters(), lr=lr)
self.value_optimizer = optim.Adam(self.value_net.parameters(), lr=lr)
self.memory = []
def select_action(self, state):
state = torch.FloatTensor(state).unsqueeze(0)
action_probs = self.policy_net(state)
m = Categorical(action_probs)
action = m.sample()
return action.item(), m.log_prob(action)
def store_transition(self, transition):
self.memory.append(transition)
def compute_advantages(self, rewards, dones, values, next_value):
advantages = []
gae = 0
values = values + [next_value]
for step in reversed(range(len(rewards))):
delta = rewards[step] + self.gamma * values[step + 1] * (1 - dones[step]) - values[step]
gae = delta + self.gamma * self.lambda_ * (1 - dones[step]) * gae
advantages.insert(0, gae)
returns = [adv + val for adv, val in zip(advantages, values[:-1])]
advantages = torch.tensor(advantages, dtype=torch.float32)
returns = torch.tensor(returns, dtype=torch.float32)
return advantages, returns
def update(self):
states, actions, log_probs, rewards, dones = zip(*self.memory)
states = torch.FloatTensor(states)
actions = torch.LongTensor(actions)
old_log_probs = torch.stack(log_probs).detach()
rewards = list(rewards)
dones = list(dones)
with torch.no_grad():
values = self.value_net(states).squeeze().tolist()
next_state = states[-1]
next_value = self.value_net(next_state).item()
advantages, returns = self.compute_advantages(rewards, dones, values, next_value)
for _ in range(UPDATE_EPOCHS):
# 采样数据
for index in BatchSampler(SubsetRandomSampler(range(len(self.memory))), BATCH_SIZE, False):
sampled_states = states[index]
sampled_actions = actions[index]
sampled_old_log_probs = old_log_probs[index]
sampled_advantages = advantages[index]
sampled_returns = returns[index]
# 计算新的动作概率
action_probs = self.policy_net(sampled_states)
m = Categorical(action_probs)
new_log_probs = m.log_prob(sampled_actions)
# 计算比率
ratios = torch.exp(new_log_probs - sampled_old_log_probs)
# 计算损失
surr1 = ratios * sampled_advantages
surr2 = torch.clamp(ratios, 1 - self.clip_eps, 1 + self.clip_eps) * sampled_advantages
policy_loss = -torch.min(surr1, surr2).mean()
# 价值网络损失
value_preds = self.value_net(sampled_states).squeeze()
value_loss = nn.MSELoss()(value_preds, sampled_returns)
# 总损失
total_loss = policy_loss + 0.5 * value_loss
# 更新策略网络
self.policy_optimizer.zero_grad()
policy_loss.backward()
self.policy_optimizer.step()
# 更新价值网络
self.value_optimizer.zero_grad()
value_loss.backward()
self.value_optimizer.step()
# 清空记忆
self.memory = []
训练过程
下面的代码展示了如何使用 PPO 智能体在 CartPole-v1 环境中进行训练:
def train():
env = gym.make('CartPole-v1')
state_dim = env.observation_space.shape[0]
action_dim = env.action_space.n
agent = PPOAgent(state_dim, action_dim, LR, GAMMA, LAMBDA, CLIP_EPS)
for episode in range(1, NUM_EPISODES + 1):
state, _ = env.reset()
done = False
total_reward = 0
while not done:
action, log_prob = agent.select_action(state)
next_state, reward, terminated, truncated, _ = env.step(action)
done = terminated or truncated
agent.store_transition((state, action, log_prob, reward, done))
state = next_state
total_reward += reward
if done:
agent.update()
print(f"Episode {episode}, Total Reward: {total_reward}")
break
env.close()
if __name__ == "__main__":
train()
关键步骤解释
- 环境初始化: 使用
gym.make('CartPole-v1')创建 CartPole-v1 环境。 - 智能体初始化: 实例化 PPOAgent,传入状态维度、动作维度、学习率、折扣因子等超参数。
- 选择动作: 通过智能体的
select_action方法,根据当前状态选择动作,并获取其对数概率。 - 与环境交互: 执行动作后,获得下一个状态、奖励和是否终止的信号。
- 存储轨迹: 将当前的状态、动作、对数概率、奖励和终止信号存储到智能体的记忆中。
- 更新智能体: 在每回合结束后,调用智能体的
update方法,使用存储的轨迹数据更新策略网络和价值网络。 - 打印进度: 输出当前回合的总奖励,便于监控训练进展。
优势函数与广义优势估计(GAE)
优势函数是评估一个动作相对于平均水平的好坏程度。广义优势估计(Generalized Advantage Estimation, GAE)是一种平衡偏差和方差的方法,用于更准确地估计优势函数。
在 PPO 算法中,优势函数用于计算策略更新的目标,从而使得更新过程中更加稳定和高效。
策略更新与裁剪
PPO 算法通过引入裁剪机制(Clipping)来限制策略更新的幅度,防止策略在更新过程中发生剧烈变化,从而保持训练的稳定性。
# 计算比率
ratios = torch.exp(new_log_probs - old_log_probs)
# 计算损失
surr1 = ratios * advantages
surr2 = torch.clamp(ratios, 1 - clip_eps, 1 + clip_eps) * advantages
policy_loss = -torch.min(surr1, surr2).mean()
通过取两者中的最小值,PPO 保证了策略更新的变化不会超过设定的裁剪范围 clip_eps,从而防止了策略的过度更新。
总结
本指南详细介绍了如何使用 Python 和 PyTorch 库,通过 PPO 算法对 Gymnasium 的 CartPole-v1 环境进行训练。关键步骤包括定义策略网络和价值网络、实现 PPO 智能体、计算优势函数以及通过裁剪机制稳定策略更新。通过不断训练,智能体将逐渐学会在 CartPole 环境中保持杆子的平衡,最大化累计奖励。
参考资料
进一步优化与扩展
在实际应用中,可以通过以下方法进一步优化和扩展 PPO 算法的性能:
- 使用经验回放: 存储更多的轨迹数据,以便在策略更新时使用多样化的数据源。
- 网络架构调整: 增加神经网络的深度或宽度,以提升模型的表达能力。
- 奖励归一化: 对奖励进行归一化,有助于加速训练过程并提高稳定性。
- 多线程或并行环境: 使用多个环境并行采样,以提高数据采集效率。
- 调节超参数: 根据具体任务需求,调整学习率、折扣因子、GAE参数等超参数,以获得更好的性能。
结语
强化学习,特别是 PPO 算法,是一个功能强大的工具,适用于各种控制任务。通过本指南的学习和实践,读者应能够理解 PPO 算法的基本原理,并能够在 Gymnasium 环境中实现和训练自己的强化学习代理。持续的实验和优化将有助于进一步提升模型的性能和适应性。
Last updated January 3, 2025