
Minimal Representation of the Value Function in a 2nd-Order Markov Process
Understanding the Essentials of Value Function Representation in Higher-Order Markov Decision Processes
Key Takeaways
- In a 2nd-order Markov process, the value function must consider two consecutive states.
- The minimal sufficient representation for the value function in this context is V(si, si+1).
- Augmenting the state representation can allow the value function to depend solely on the current augmented state.
Introduction to Markov Processes
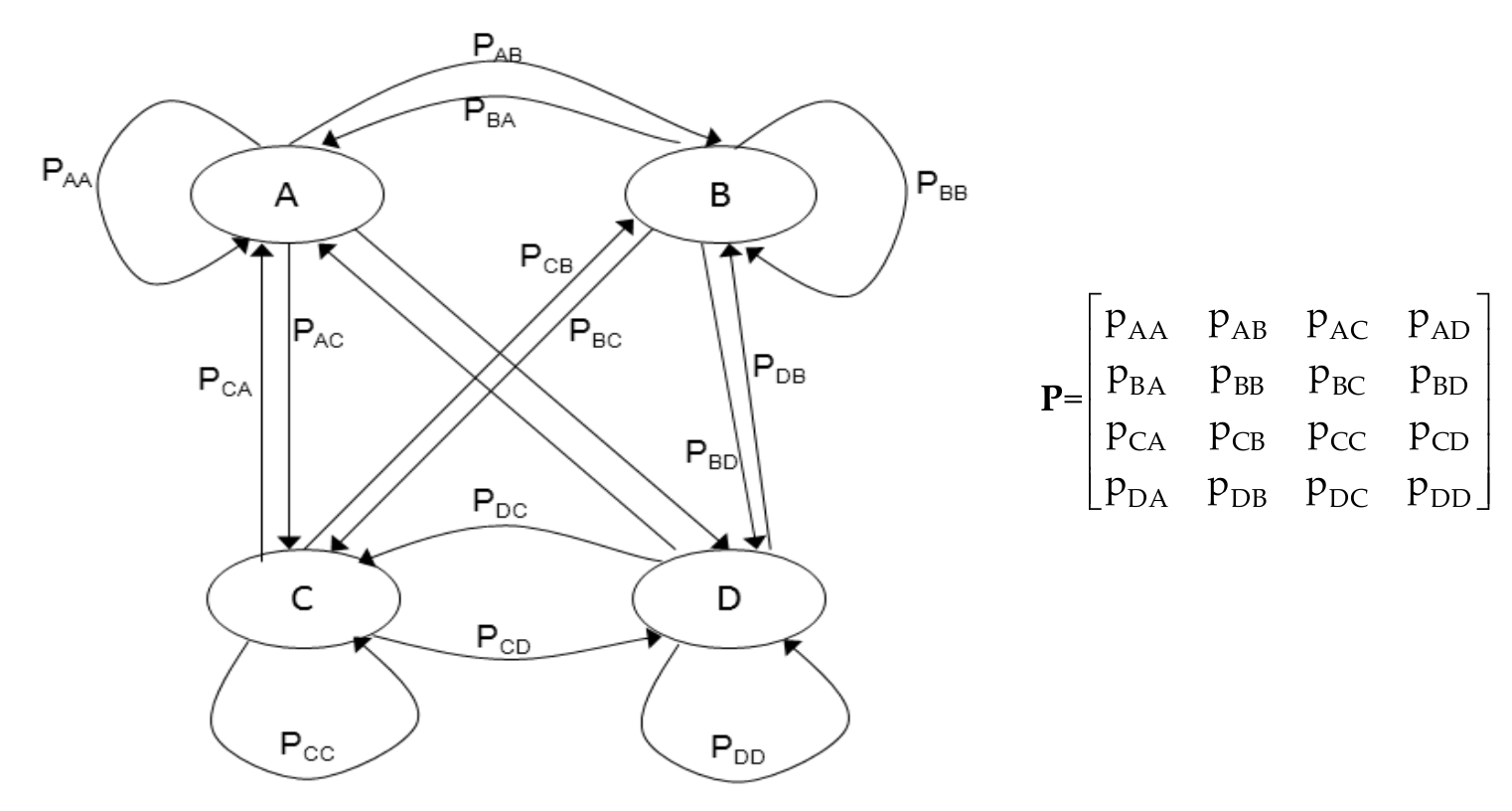
Markov processes are mathematical models that describe systems transitioning from one state to another within a finite or countable number of possible states. A fundamental property of Markov processes is the Markov property, which asserts that the future state depends only on the current state and not on the sequence of events that preceded it. However, in certain applications, processes exhibit dependencies that span beyond just the immediate previous state, leading to higher-order Markov models.
Understanding 2nd-Order Markov Processes
In a 2nd-order Markov process, the probability of transitioning to the next state is influenced by the two most recent states, rather than just the current one. This is particularly pertinent in scenarios where historical context significantly affects future transitions, such as in certain decision-making processes, time series forecasting, and more complex reinforcement learning environments.
Defining the Value Function
The value function in the context of Markov Decision Processes (MDPs) quantifies the expected return (cumulative reward) starting from a particular state and following a specific policy thereafter. Accurately representing this function is crucial for effective decision-making and policy optimization.
Higher-Order Dependencies and Their Implications
When extending Markov processes to higher orders, such as the 2nd-order, one must reconsider how state dependencies are modeled. Specifically, the value function must encapsulate the necessary historical information to maintain the Markov property within the augmented state space.
Minimal Representation of the Value Function
Considerations for 2nd-Order Markov Processes
In a 2nd-order Markov process, since the next state depends on the two preceding states, the value function must account for this dependency to accurately reflect the expected returns. This necessitates incorporating information from both the current and previous states into the value function's representation.
Available Options for Value Function Representation
Given the following options for the value function representation:
-
V(si)
-
V(si, si+1)
-
V(si, si+1, si+2)
-
V(si, si+1, si+2, si+3)
Evaluating Each Option
1. V(si)
This representation considers only the current state. While sufficient for a 1st-order Markov process where the next state depends solely on the current state, it fails to capture the necessary historical dependency inherent in a 2nd-order Markov process. Therefore, it lacks the required information to accurately represent the value function in this context.
2. V(si, si+1)
By including both the current state (si) and the previous state (si+1), this representation effectively captures the two-state dependency characteristic of a 2nd-order Markov process. This alignment ensures that the value function accounts for the necessary historical context, making it the minimal sufficient representation for accurately modeling expected returns.
3. V(si, si+1, si+2)
This option extends the dependency to three states, which exceeds the requirements of a 2nd-order Markov process. While it would provide a more detailed historical context, it introduces unnecessary complexity without offering additional benefits for this specific scenario.
4. V(si, si+1, si+2, si+3)
Similar to the previous option, this representation includes four states, further exceeding what is necessary for a 2nd-order process. It not only adds complexity but also risks overfitting, making it an impractical choice for accurately and efficiently representing the value function in this context.
Conclusion on Minimal Representation
Among the provided options, V(si, si+1) emerges as the optimal minimal representation for the value function in a 2nd-order Markov process. It balances sufficiency and efficiency by encapsulating the essential two-state dependency without introducing unnecessary complexity.
Augmenting State Representations
An alternative approach to handling higher-order dependencies in Markov processes involves augmenting the state representation itself. By redefining the state to inherently include the necessary historical context, the value function can be simplified.
Augmented State Spaces
Suppose we redefine the state si to include information about the previous state, effectively creating an augmented state s'i = (si-1, si). In this setup, the process can be treated as a 1st-order Markov process in the augmented state space, allowing the value function to remain as V(s'i), which conceptually aligns with V(si, si+1).
Implications for Value Function Representation
By augmenting the state space, we encapsulate the necessary historical dependencies within the state itself. This means that the value function can still be expressed in terms of a single current state in the augmented space, potentially simplifying computations and policy representations.
Practical Considerations
While augmenting the state space can offer conceptual and computational advantages, it also increases the dimensionality of the state space, which may lead to higher computational costs and challenges in managing larger state representations. Therefore, the choice between augmenting the state space and directly representing the value function with multiple states depends on the specific application and computational resources available.
Comparative Analysis of Value Function Representations
To further elucidate the differences between the various value function representations, the following table provides a comparative analysis.
| Value Function Representation | Order of Markov Process | State Dependencies | Pros | Cons |
|---|---|---|---|---|
| V(si) | 1st-Order | Depends only on the current state (si). | Simplest representation, low computational cost. | Insufficient for higher-order dependencies. |
| V(si, si+1) | 2nd-Order | Depends on the current and previous states (si, si+1). | Captures necessary historical dependencies for 2nd-order processes. | Increased state space dimensionality compared to 1st-order. |
| V(si, si+1, si+2) | 3rd-Order | Depends on current and two preceding states. | Covers more extensive historical dependencies. | Unnecessarily complex for 2nd-order processes, higher computational costs. |
| V(si, si+1, si+2, si+3) | 4th-Order | Depends on current and three preceding states. | Maximal historical context. | Excessively complex for most practical applications, high computational overhead. |
Conclusion
Accurately representing the value function in a 2nd-order Markov process requires careful consideration of state dependencies to ensure that the Markov property is preserved within the model. Among the provided options, V(si, si+1) stands out as the minimal and sufficient representation, effectively capturing the necessary historical context without introducing unnecessary complexity. Alternatively, augmenting the state space to include historical states allows for simplification of the value function representation but comes with trade-offs in terms of increased state dimensionality.
References
Last updated February 12, 2025